封口刀
來源:http://www.fangzh.cn/ 發布時間:2021-11-06 瀏覽次數:0

一、 設備主要用途
設備為三軸數控自動焊接專機,可Y(前后)方向移動直線焊接,也可Y、Z(上下)方向聯動斜線焊接或圓弧焊接。X(左右)軸用于工位切換使用。
二、 適應工件范圍:
l 工件長度:焊接長度50-200mm,工件總長500-2500mm
l 工件寬度:20-60mm
l 工件高度:20-150mm
l 工件壁厚:0.8-3mm。
l 材質:碳鋼、鍍鋅板(鍍鋅過厚的不能焊接)。
三、 設備制作思路
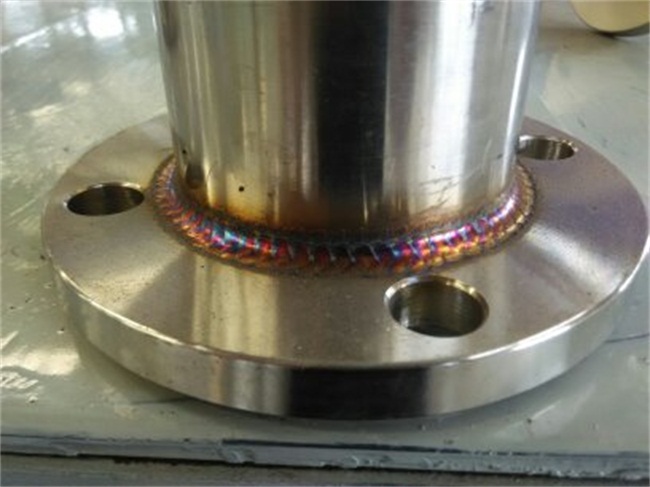
1. 焊接方式及動作:采用MAG焊方式焊接;工件擺放在工作平臺上氣動夾緊定位,焊槍數控移動對工件的兩條直縫進行焊接。
2. 設計結構:該專機由床身、固定平臺、三維機械手臂、橫梁立柱、二維十字微調、焊槍調節架和夾具、定位夾具、控制柜和焊接電源等部件組成。
Ø 床身與固定平臺:該專機床身形狀為書桌式,平臺面為厚板拼裝,上面開定位安裝孔,底部有水平調整墊鐵。
Ø 三維機械手臂:由左右移動X軸、上下移動Z軸、前后移動Y軸拼裝組成,可上下、左右、前后電動快速移動,X軸由矩形型材精加工后安裝直線導軌而成,上面裝有1組左右移動滑板,由步進電機驅動,滾珠絲杠傳動,實現數控的左右移動。X軸的移動滑板上垂直安裝Z軸,Z軸由模組專用工業鋁型材精加工后安裝直線導軌而成,上面裝有1組上下移動滑板,由步進電機驅動(帶制動),滾珠絲杠傳動,實現數控的上下移動。Z軸的移動滑板上水平安裝Z軸,Z軸由模組專用工業鋁型材精加工后安裝直線導軌而成,上面裝有1組前后移動滑板,由步進電機驅動,滾珠絲杠傳動,實現數控的前后移動。
Ø 橫梁立柱:立柱為方形型材,上放與橫梁后面鏈接,下面與床身后面鏈接,連接方式為螺栓緊固。
Ø 三維十字微調機構及焊槍夾具:該機構固定在送槍機構上,用于焊槍的上下、前后、左右調節,便于對準焊縫。
Ø 定位模具:可擺放兩個工件,模具左右對稱,可整體拆掉更換方便。
l 堵片定位:根據堵片外形制作定位塊,預留焊縫位置。
l 方管夾緊:中部共用固定定位塊,兩側氣動夾緊。
Ø 控制系統:
電氣控制系統采用直角坐標機械手專用焊接控制器為主控單元,工作原理是示教再現的形式,即由操作員導引自動焊接設備,按實際任務順序操作一遍,操作員通過示教器在導引過程中錄入示教的每個動作的位置坐標、姿態、運動參數以及可通訊的外圍設備的參數,機器人并自動優化軌跡,生成一個可連續執行全部指令的程序。完成示教后,只需給機器人一個起動命令,機器人將精確地按示教動作,連續完成全部指令,實現示教再現。本控制系統一般可存儲上百個加工程序。